
煤矿用导航定位产品
-

掘进机导航定位产品
悬臂式掘进机导航定位系统由激光导引装置和位姿测量装置两部分组成,采用“惯性导航+视觉测量”的组合导航定位方案。该方案以安装在掘进机上的位姿测量量装置为导航定位的核心,其内部集成了光纤惯导系统和定位靶标,在掘进机后方悬挂安装激光导引装置,通过测量定位光靶,对掘进机进行实时的位置测量和定期的精确修正,进而实现长时间连续高精度的导航、定位功能。
了解更多 -
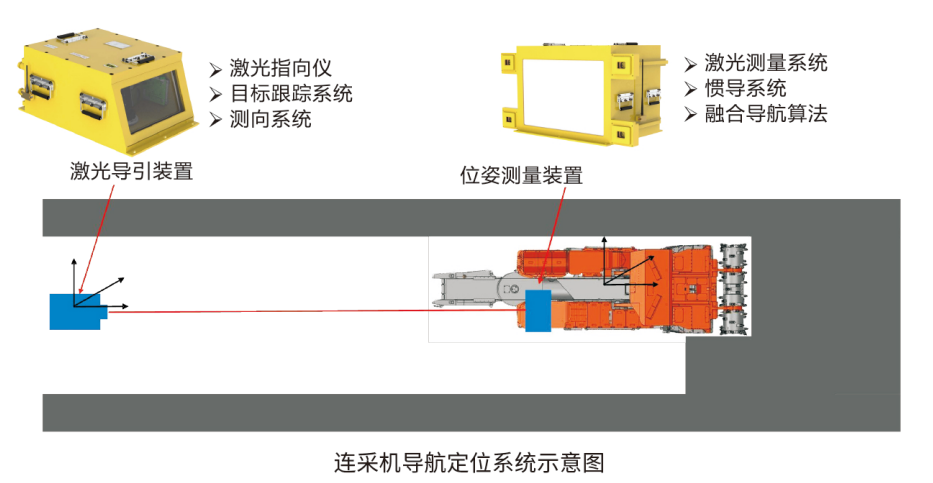
连采机导航定位产品
连采机导航定位产品由激光导引装置和位姿测量装置两部分组成,采用“惯性导航+视觉测量+目标跟踪”的组合导航定位方案,可在任何工况下连续长时间的提供连采机的航向、姿态和位姿信息。 位姿测量装置安装在连采机机身上,激光导引装置安装在连采机后方位置(顶板、卷电缆车等)。激光导引装置射出的导引激光投射到位姿测量装置的光靶上,靶面敏感激光光束并定位。当连采集位置发生变化时,通过检测投射到光靶表面的激光点位置变化解算出连采机的姿态信息和位置偏移信息。激光导引装置具备靶面跟踪功能,当连采机位置变化幅度较大时,可确保激光光
了解更多 -
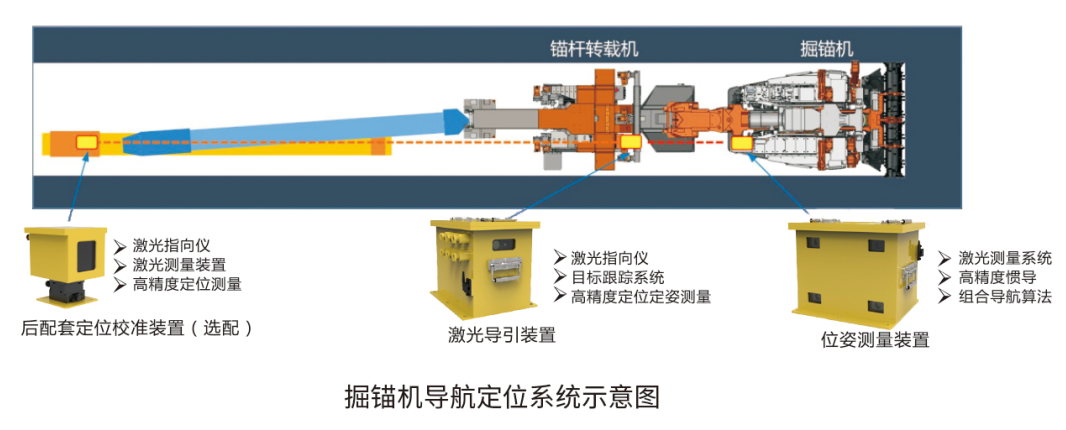
掘锚机导航定位产品
掘锚机(快掘系统)导航定位产品由激光导引装置、位姿测量装置和定位校准装置三部分组成,采用“惯性导航+视觉测量+定位校准”的多源组合导航定位技术和独创的同步定位技术,可在任何工况下实时、连续、同步的提供掘锚机和运锚机/连云车的的航向、姿态和位姿信息,进而实现两设备之间的步距行走和自动跟随行走。 采用“光学测量+激光阵列测量技术”,通过定位校准装置,测量并校正长距离、快速掘进条件下掘锚机的累计定位误差。
了解更多 -
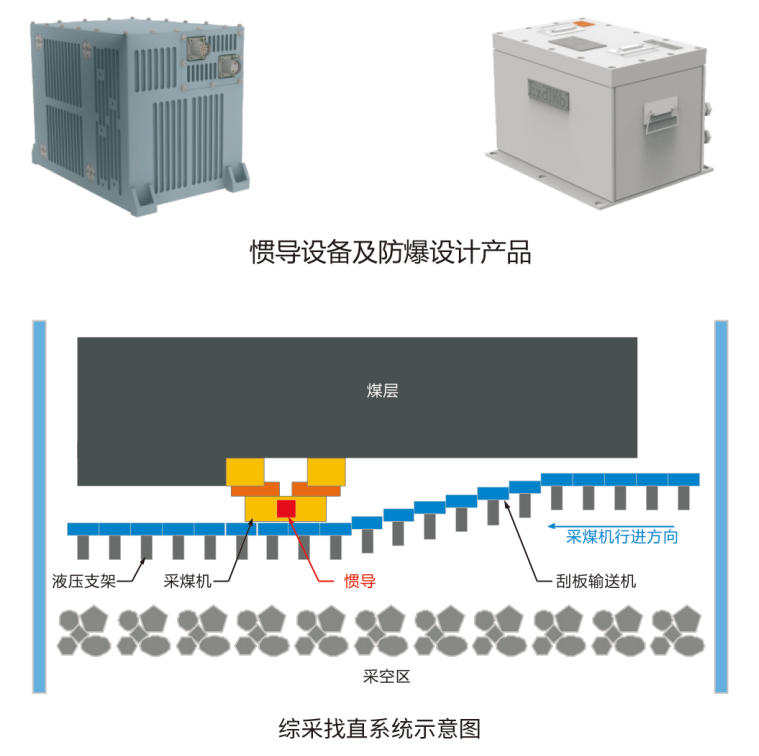
综采设备用惯导产品
采煤机导航定位系统采用“惯性导航+里程计”的组合导航技术,实时检测采煤机的位置和姿态信息,描绘工作面运输机的实际形状。电液控利用惯导的测量轨迹数据,计算出每个液压支架需要单独的推移行程,通过对每个液压支架推移行程单独闭环控制来达成直线度控制目标,以保证综采工作面连续生产过程中不需要人工调架,提高生产效率和安全性。
了解更多 -
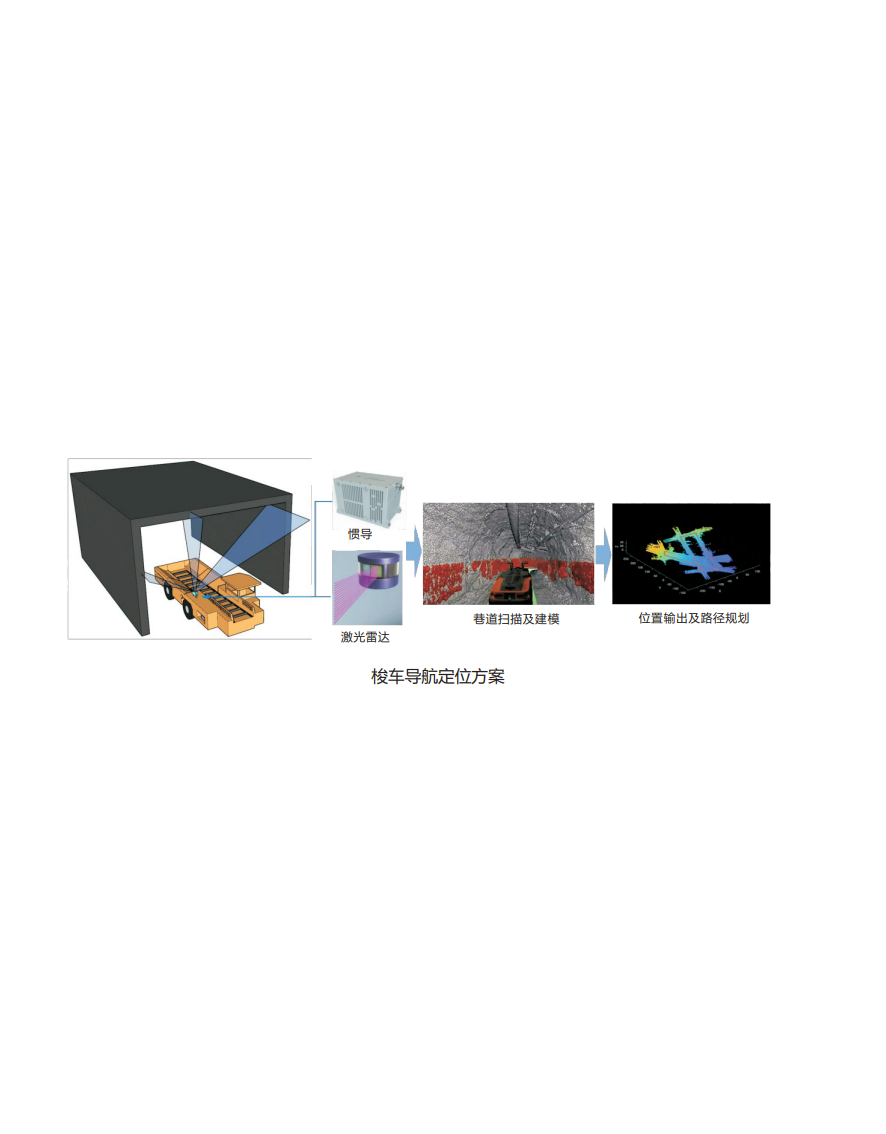
梭车导航定位产品
梭车导航定位产品采用“多线激光雷达+高精度惯导”的组合导航定位技术,通过车身上安装的惯导系统,为激光雷达提供准确的姿态信息;激光雷达扫描车身横轴方向,获取巷道两侧壁和顶棚的形貌信息;多次扫描结果拼接获取巷道整体三维地图;通过梭车路径的拓展,逐步对单个工作面单元的地图进行拓展和完善。 采用SLAM算法,实时提供梭车的位置和姿态信息;依据建立的三维透视模型,根据巷道和梭车运动模型,设计合理算法,提前规划梭车运行轨迹。
了解更多